OS | Operating System Introduction
Operating System: Design and Implementation course notes from CCU, lecturer Shiwu-Lo.
Introduction
1.1 Why need OS
1.3 User mode/Kernel mode
1.5 User space/Kernel space
1.6 Memory management
1.7 Change mode & System call
1.8 Signal & Systemcall
1.9 Monolithic kernel
1.10 Kernel module
1.1 Why need OS
- 作業系統使電腦更易於使用
- 磁碟是由 Block(通常為4K) 所組成,OS 將磁碟劃分為 File,再將檔案歸類為 Folder 才易於使用。
- 可程式化(Programmable) 變得更容易,OS 能執行執行檔,CPU 執行不同程式碼就會有不同功能。 OS 使程式碼抽象為執行檔,能夠從各個地方載入可執行的程式碼,並且賦予邏輯上的支援。
- 硬體抽象化(Hardware abstraction) 如滑鼠、觸控板被 OS 抽象化為一個指標裝置,使使用者能統一操作。
- OS 上不會只運行一個程式,因此必須有應用程式之間的通訊,如: Copy & Paste。
- 使電腦的硬體使用更有效率(資源分配)
- 一台電腦可能有多個硬體存在,OS 可以使這些硬體一起工作。
- 例如在足夠記憶體的情況下可以同時載入多個執行檔並執行,並使用硬碟堆放暫時用不到的記憶體,以空出記憶體給真正需要的程式。
- 透過 CPU Scheduler,使 I/O、CPU 都能維持在高使用率。
1.3 User mode/Kernel mode
大部分的作業系統以雙系統(Dual-Mode)(Linux, Windows),可分為 User mode 與 Kernel mode:
- Dual mode operation
- User mode: CPU 所提供的執行模式,只能存取有限的硬體資源,如:
普通運算所需的暫存器、部分記憶體內容- Various applications: libreoffice, gnuplot, pdf viewer
- GUI: X11, Gnome, KDE
- System manager: bash, vi, ls, mount, passwd
- Development tools: gcc, gdb
- System service: sftpd, sshd
- Basic inetrnet communication software: Browser, ftp
- Other library: courses, math
- Standard function library: Parts defined in POSIX like, libC, pthread
- Kernel mode: CPU 所提供的執行模式,可以對硬體做任何的變更,在 Kernel mode 能額外控制的部分如下:
控制暫存器(Control register),例如控制 MMU(Memory management unit) 的相關暫存器、所有記憶體- Memory management
- Schedule and thread management
- Inter-Process communication
- Virtual memory
- Network communication
- Scheduler
- File system
- Safety, Authority management
- I/O Subsystem
這種模式下 Kernel mode 才能完全的掌控硬體,今天如果 User mode 上的程式想要存取硬碟則需要透過 System call 來進行操作。在 Linux 的設計原則是速度第一,當然程式越靠近硬體就會更快。 但如果 User mode 想要操作硬體要透過 System call 來進行也就是改變模式(Change mode),但這樣會產生一定的消耗。而在 Kernel mode 中進行操作硬體就只等於 Function call 的消耗而已。
- User mode 想要進行切換就可能需要保存當前狀態以回復、清除 Pipeline、清除 TLB 和 Cache 這些額外消耗。
- Dual mode 通常需要硬體額外支援,例如提供一個 Mode bit 的暫存器來決定現在是哪一種 Mode。
例如一個網頁,可以將靜態頁面放在 Kernel mode,動態頁面在 User mode。
但不是將所有程式都放在 Kernel mode,因為只要是程式就會有 Bug,在 Kernel mode 中發生了 Bug 很可能導致整個系統的崩潰。
1.5 User space/Kernel space
虛擬記憶體(Virtual memory)也分為 User/Kernel space,這主要是為了保護 Memory 與 Hardware。 CPU 在切分記憶體時每個單位會附加一些屬性,其中一個重要的屬性就是指出該單位為 User/Kernel space。
- Task 之間不能讀取各自的 User space。
- Kernel 才能改變權限,I/O,並且擁有所有的存取權。
| 可否存取 | Kernel space | User space | Privilege instructions |
| Kernel mode | ✓ | ✓ | ✓ |
| User mode | ✓ |
1.6 Memory management
Virtual memory 的管理單位可以分為兩種,分頁(Paging),分段(Segmentation):
- Paging: 將連續的記憶體在邏輯上變成 4K 大小的 Page 方便軟、硬體對記憶體進行管理
- 這是目前最常見的做法,在管理上可以較好的分配記憶體
- 作業系統會盡量使用 Huge page(大分頁),一個 Huge page 可以有 2M 到 1G 的大小,因為這樣需要的 Page 數量較少, 在硬體管理上會希望 Page 盡量大一點。
- 但是 Linux 在 User space 幾乎沒有使用大分頁,除非特別去設定要使用 Huge page,因為在軟體上管理 Page 反而 4K 可以減少記憶體浪費。
- Segmentation: 將連續的記憶體在邏輯上變成各個大小不一的 Segment,每個 Segment 對應到程式的特定用途
- x86 在 32 位元模式支援 segmentation
- Segment 在配置上比較困難,但在嵌入式系統中因為沒有什麼動態配置的需求因此較常用
以上的方法都需要硬體支援,是因為 CPU 與硬體的處理速度因此需要硬體支援才能使速度提升。
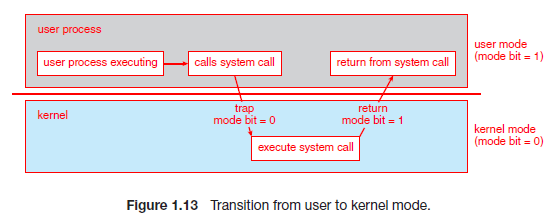
1.7 Change mode & System call
從 User mode 切換到 Kernel mode,是透過 syscall 這個組語來進行:
OS init 時會告訴 CPU 當使用者呼叫 syscall 的時候,指令指標(%RIP Register)應該設定為何(system call 的進入點),syscall 做兩件事:
- 保存當前的程式狀態,以便之後返回
- 將模式切換為 Kernel mode,例如將 Mode bit 設為 0
- 準備要被呼叫的 System call,例如在x86-64架構中的 %RAX Register 放入要被呼叫的 System call 編號
切換 Stack:
- User space stack 一開始只配置 16K,不夠再送 Signal 給 Kernel 一次多要 4K Page 最多成長到 8M
- Kernel space stack 的大小並不會很大,並且 System call 也不會使用產生堆疊的寫法
- User/Kernel mode 的堆疊是分開的,Kernel 不能產生 fault,所以在 Kernel mode 使用的是 Kernel space stack
- 穩定性: 例如 User mode 已經故意執行了一個 7.8M 堆疊的程式,此時 Change mode 但沒有使用 Kernel space 這樣就會遇到 Segmentation fault
- 保密性: 同時 User space stack 如果執行完沒有進行清空也有可能洩漏 Kernel 的資料
- 在 syscall 準備 system call 的時候同時還要準備執行環境,例如執行 write(clang) 就要準備好要使用的 stack 來呼叫 C 函數
- 如果在沒辦法切換堆疊的系統上,也要盡量表留一個給 Kernel mode 使用的堆疊大小 16K
從 Kernel mode 回到 User mode,需要用到 sysret 指令來進行,此時 OS 會返回地址(接下來執行的 User mode 程式碼),sysret 做兩件事:
- 返回 user mode 的程式碼位置,例如 x64 放在 %RCX Register
- 切換為 user mode,例如將 Mode bit 設為 1
不是所有的 System call 都會進行完整的 Context switch,例如
getpid(),就不需要把當前的程式狀態保存完整。
- System call handler 必須確保從 Kernel 返回 User mode 時,程式將來可以繼續執行
Super user 也是使用相同的 System call 進入點,大部分的 System call 會判斷權限但 uid=0 的時候就直接通過,General user 的 uid > 1000。
Linux 定義了約 400 System call(Function),大部分都透過 syscall 進入 Kernel。
1.8 Signal & Systemcall
當 Kernel 有特別事件需要主動通知 Process,就使用 Signal 機制,Signal 接受兩個重要參數: 事件編號、發生該事件時呼叫該程式所定義的特定函數
- 事件編號: 例如 SIGINT 的編號是 2,表示鍵盤中斷(例如 Ctrl + C),每種 Signal 都有唯一的編號,OS 中已被定義
- 該事件發生時所處理的函數,可以是程式自己定義的函數或是系統默認的函數呼叫
Linux kernel 只允許一個 Process 同時間發出一個 Blocking system call,需要等待 Kernel 完成該工作(System call)才回傳的系統呼叫。 當 Process 發出 Blocking system call 後,該 System call 還未結束前如果發生 signal(例如 Ctrl + C),Kernel 該如何處理?
- 不理會該 Signal,繼續完成 System call
- 處理該 Signal,該 System call 變成失敗,通常作業系統會重新起始(Redo)該 System call
延伸閱讀 Linux Signals、Interruption of system calls when a signal is caught
1.9 Monolithic Kernel
假如一個人一天可以讀 1000 行程式碼,Linux kernel 的成長速度可能是一天超過 3000 行。
- Monolithic kernel 大部分的系統功能都設計在 Kernel mode 中,這樣的好處是執行效率,各個模組間的溝通僅為 Function call, 但同樣的 Kernel 也變得越來越複雜,也容易產生錯誤。
- Micro kernel 盡可能的將 OS 的系統服務執行於 User mode,讓系統變的較為穩定, 但是 User mode 的 Process 通訊需要觸發 Context switch 與 Mode change,效能較為低落。
| 設計模式 | 系統程式 | 效能 | 核心大小 | 通訊消耗 | OS |
|---|---|---|---|---|---|
| Monolithic | 大部分在 Kernel mode | 高 | 大 | Function call 的消耗 | Linux, BSD |
| Micro | 大部分在 User mode | 低 | 小 | Context switch 的消耗 | Minix, L4, Android |
Linux 在安全性思考上可以思考 root 的權限是否太大了,root 有權看到所有的資訊,在安全性上可以透過加密來做到。
Context switch & Mode change 這兩個要分清楚:
- Context switch: 原本在執行 Process A,現在要換成 Process B
- Mode change: Process A 原本執行在 User mode,因為要執行 System call 現在要切換到 Kernel mode
1.10 Kernel Module
Kernel moduel 在意義上就是核心的插件,可以擴充核心的功能,最直觀的插件就是驅動程式。 Monolithic 設計下的 Kernel module 運行在 Kernel mode,Micro kernel 則相反。
- Kernel module 在需要的時候再載入,例如 USB 如果是是一個 ext4 file system, 插入電腦後 Linux Kernel 認出後就能載入 ext4 module 來讀取該 USB
lsmod列出目前的 Kernel module,並且 Kernel module 之間會有相依性,例如如果 Network 是一個寫好的 Kernel Module, 那它就會依賴於 Network card 的 Kernel module。
Main Memory
1.11 Main memory usage
1.12 Memory and storage consistency
1.13 Linux base file system management
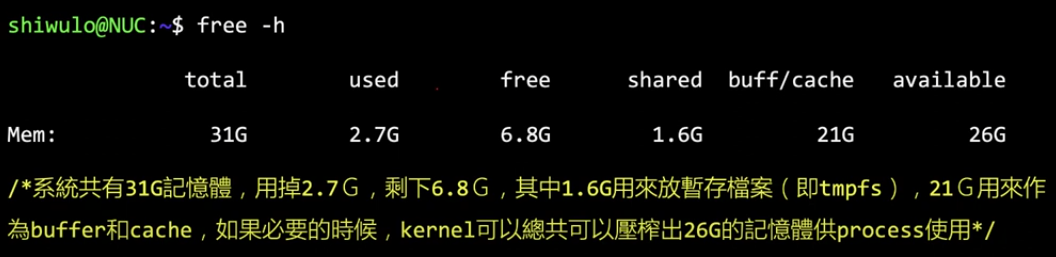
1.11 Main memory usage
Linux 將主記憶體分為三種主要用途:
- Cache memory(Page cache):
- 將 Disk 或 SSD 等儲存裝置上的內容暫存於記憶體中,以提高存取速度
- 檔案系統的 Metadata!?
- Buffer memory:
- 與 I/O 之間的的資料交換,DMA
- 主要是 CPU 的速度高於周邊速度,格式的轉換等等(如網路卡)
- Program memory:
- 將記憶體分配給程式使用,如: 程式可以透過 malloc(背後的 System call 常常是 brk)、nmap 等函數索取記憶體
- 執行檔必須載入主記憶體後才能執行
Linux 原則上會盡可能的使用掉所有記憶體以加速 I/O,當記憶體不足時 Linux 會釋放 Cache memory 和 Buffer memory。
1.12 Memory and storage consistency
主記憶體採用 DRAM 斷電後失去內容,因此需要非揮發性的第二層儲存裝置(Secondary storage,Disk, SSD)。
- 而電腦必須將第二層儲存裝置的內容載入記憶體後才可以供 CPU 運算
- 可以透過明確的程式碼存取資料,如: open, read, write
- 也可以透過 mmap 的方式將檔案 Maping 到應用程式的記憶體空間加以處理
- 程式與 OS 都必須定期的將資料回存到下層裝置
- OS 與 I/O 函數庫都可能透過 Buffering 的機制,以批次的方式寫出資料以增加效率
- 應用程式可以呼叫函數強制將資料寫出,如: sync, fsync, fdatasyc
效能上的考量 read > write,read 不能延遲,延遲將導致程式無法執行。
結果上的考量 write > read,當使用者使用 Ctrl+S 進行儲存時,若在中途當機資料並沒有真的寫入 Disk,使用者將無法接受。
write 往下寫入時不一定馬上把資料寫入 Disk,有可能只是先暫時存在 Memory/Buffer 中,同時裝置上可能也會有 Buffer 例如 SSD。
這裡有例如 Write-through,Write-back 等不同方式的寫入是 OS 能進行操作的。
- Write-through: 寫入 Main memory 時同時寫入 Cache 這樣可以保證資料的一致性
- Write-back: 寫入數據時先寫入 Cache,並將資料標記為
dirty(已修改但未寫回主記憶體),然後在稍後的時間點將資料寫回記憶體,例如: Cache 需要新的空間來儲存新的數據
深入思考,如果裝置上能有電池的話就能保證寫入時部份的安全性,如果已經寫入裝置上的 Buffer 此時電源出現意外也能短時間內進行儲存
1.13 Linux base file system management
- 九字檔案權限管理,分為檔案與資料夾,詳情可看鳥哥的介紹 第七章、Linux 磁碟與檔案系統管理
- Linux 的檔案系統支援 ACL(Access control list)
- ACL 可以對各個使用者或各個群組分別設定權限
- ACL 依賴底層的檔案系統支援,如: EXT4, BTRFS 等都支援 ACL
- 可以使用指令
setfval與getfacl分別設定及讀取檔案或目錄的權限
但是有時後 Normal user 也需要更改權限來執行某些程式,例如: passwd, 他會在執行中使用 setuid 來暫時改變使用者權限, 直到 passwd 執行結束(或者是該程式放棄 root 權限)
Computer world 中的權限往往與現實世界的權限不相等
- Linux 中 root 擁有最高權限,root 可以對檔案系統、應用程式(記憶體)進行各式樣的操作
- root 可以存取所有使用者的檔案(甚至是機密檔案),這與真實的權限不符合(老闆 = Normal,系統管理者 = Super)
- 目前大部分的 Linux 提供資料夾加密的功能,可以部分改善問題
I/O Subsystem
1.14 I/O Subsystem & Control
1.15 I/O Subsystem transfers data
1.16 CPU and DMA compete for memory access
1.14 I/O Subsystem & Control
周邊裝置可能有不同儲存資料的方式,例如滑鼠鍵盤可能僅需要內建暫存器,而網路卡、硬碟可能有自己的內部記憶體,儲存的資料與周邊的晶片來運作裝置。 I/O Subsystem 是 OS 的一個重要部分,負責管理程式的 I/O 請求。
I/O Subsystem 的控制流程通常如下:
- 向周邊下達命令
- 於記憶體及周邊之間做資料傳輸
- 通知處理器「工作已完成」
Memory mapped I/O
目前主流使用的 I/O 方式
- 將周邊的控制「暫存器、記憶體」映射到 CPU 的「記憶體映射空間(Memory space)」
- 例如使用指令:
MOV CX, 0xFFFFFFFF;假設0xFFFFFFFF是裝置記憶體,將 CX register 的值放到位置0xFFFFFFFF就等於向下儲存資料
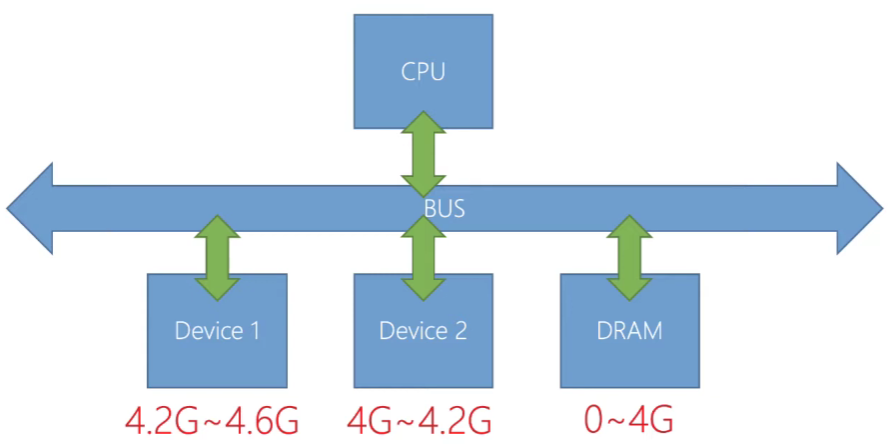
上圖模擬一個可能的 MMIO,DRAM 與不同的 Device 分別被映射到不同的記憶體區段。裝置有自己的控制暫存器、 去設定讀取的指令來在裝置的晶片上執行,在裝置暫存器讀寫的程式就被稱作(Device driver)驅動程式
Port mapped I/O
目前在一些嵌入式處理器上使用,因為 x86 是較古老的架構因此也有支援 PMIO
- 使用特別的指令,將資料傳輸到特定的「Port」,注意: Port 和 Memory space 是分開的定址空間
- x86-32 的 I/O Port 的定址空間只有 0~65535
- x86-32 的記憶體定址空間只有 0~4G
- 使用的指令形式如下:
out 0x255, AX;將 AX register 寫到 0x255 Port,對裝置寫入資料in AX, 0x100從 0x100 Port 將資料寫到 AX register,將裝置資料取回
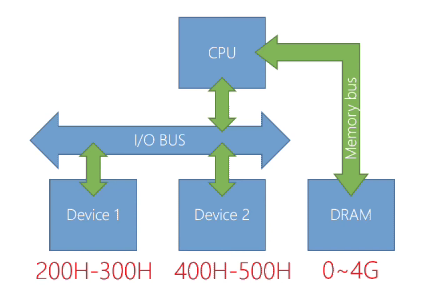
Device、Memory 分別用不同的定址方式,I/O Bus 為 64K 即最多 65536,Memory 則可以到最大 4G,這種架構下指定的速度通常比較慢,因為 MMIO 可以更簡單與直接的進行 I/O。
延伸閱讀 I/O對應的方式
1.15 I/O Subsystem transfers data
傳輸資料上,一般來說不會使用 CPU 進行,因為 CPU 要做更重要的事。DMA(Direct memory access) 是相對簡單的硬體, 專門用來做主記憶體對主記憶體的傳輸或裝置記憶體對主記憶體的傳輸。
- 簡單的 DMA 只要計數器,被搬移資料的開始位置,要搬入資料的開始位置,這樣三個 Register 就完成一個能搬移連續資料的 DMA
- DMA 可以屬於 Bus 的一部分,如: ISA,或者是裝置的一部分,如: PCI
(DMA and Cache)Coherency problem
只要有兩種介面存取同一個儲存裝置就一定會有如何同步的問題
- DMA 直接存取記憶體,但 CPU 透過 Cache 存取記憶體,這造成資料不一致(Cache 的資料一定比 Main memory 新)
- 從記憶體寫出資料到裝置時,必須將 cache 的資料 flush 到記憶體(寫入主記憶體)
- 從裝置讀取資料到記憶體時,必須先 invalid 相對應的 cache line
- Alignment
- DMA 傳輸的資料的開始及結束位置,通常要和 Cache(Cache line) 和 Memory 的寬度進行對齊
- 這部分的限制可能來自於 DMA Controller 直接將資料以「固定的大小」更新到 Cache。例如: x86 是 64 個 Byte,那傳輸資料就跟 64 Byte 對齊。硬體在這裡沒有特別做處理,使得非對齊的資料也可以部份更新
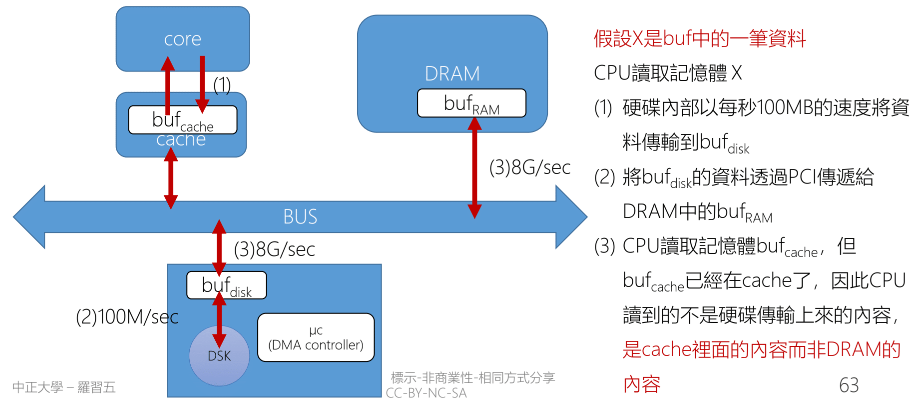
Disk 與 DRAM 之間的交換也要使用 buffer 來進行交換,才能避免低速讀寫去占用寶貴的 Bus 資源。當 bufdisk 將資料傳給 bufRAM 後此時要處理的就是 bufcache 與 bufRAM 之間的一致性
Cache 與 DMA 的資料不一致性解決之道
- (DEV => CPU) 使用硬體解決,硬體自動會將 DMA 的傳輸更新到 Cache 內(Cache coherence algorithm)
- 某些處理器,例如早期的 ARM 處理器,這部分需要特別的指令設定該段記憶體的「屬性」
- 例如直接將該段資料直接從 cache 上完整移除(flush),這樣就能確保 CPU 讀取記憶體時從 Main memory 讀取
- 用硬體來進行處理的話可以分段去處理,這樣就能在分段中偷偷傳輸資料,總有一些 Cycle 沒有被使用
- (CPU => DEV) 設定讓 CPU 在該記憶體區段進行寫入時,使用 Write through 或 Noncacheable,直達裝置上的記憶體
- Noncacheable: 直接將資料寫入該段記憶體而不透過 Buffer,這樣能確保 DMA 的資料是最新的,但會降低效能。
延伸閱讀 Cache和DMA一致性
1.16 CPU and DMA compete for memory access
- 如果 CPU 發生 Last-level-cache(LLC) miss 時,CPU 可能會合 DMA 爭奪存取權:
- 如果 CPU 訪問 LLC 時,如果發現沒有所需要的數據,CPU 可能會嘗試直接存取 Main memory,若此時 DMA 也正在進行存取, 就會產生爭奪存取權。
- DMA 每次都只傳輸小量資料,那就可以很快的禮讓控制權給 CPU,但這樣的傳輸模式很沒效率
- DMA 做大量傳輸可以提升 I/O 的效能,但可能會造成 CPU 等待 DMA 完成傳輸而閒置
延伸閱讀 Burst mode
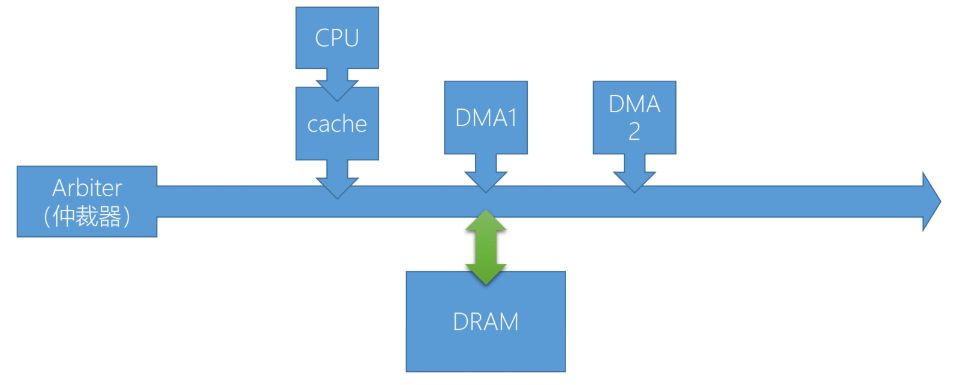
- 目前在 PCI 上每個 Device 都有自己的 DMA
- Arbiter 用來分配不同的 Device 的存取權,通常是速度越快的裝置優先權越高
DMA 的其他議題
- DMA 的定址空間
- 部分 DMA 的定址空間可能只有 32bit,OS 必須盡可能的將 DMA 能使用的記憶體保留給 DMA 使用
- I/O MMU
- 主要讓 DMA 存取實體位置不連續的記憶體
- 避免惡意的裝置或驅動程式
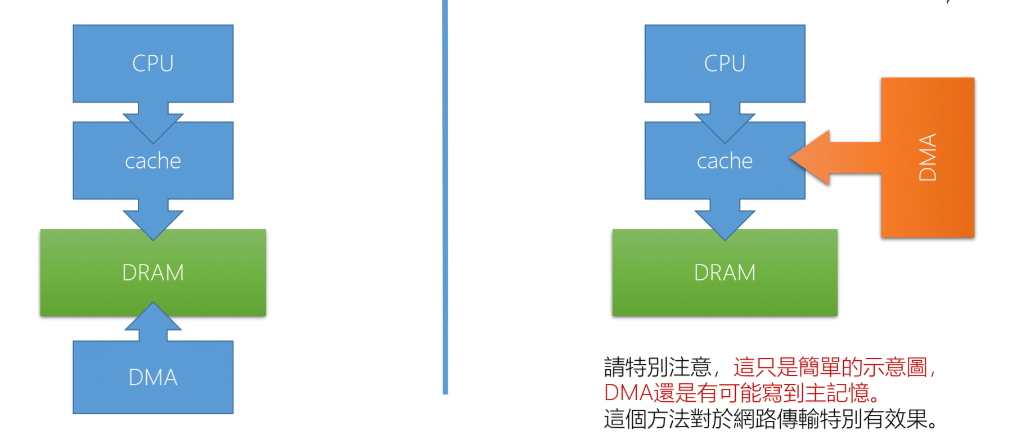
- DDIO (Data Direct I/O)
- 在某些 Intel 平台上,DMA 的傳輸可以跳過 DRAM 直接傳輸到 cache,例如: Xeon, DDIO
- 例如 ARM 上的 ACP(Access to Shared Caches),即使用 DMA 對這個裝置進行操作, 其內容也會被同步到 cache memory 裡面,包括 L1 和 L2 cache
Access to Shared Caches vs. Traditional methods
I/O Subsystem notify the CPU
1.17 Interrupt hardware concept
1.20 Interrupt vector table
1.21 Interrupt Service Routine
1.22 Bottom half
1.23 Bottom half and Top half
1.24 Polling
1.25 Buffering
OS 交付工作給周邊裝置後,於工作完成後通知 CPU 的方法可以使用:
- Interrupt
- Polling
- Interrupt + Polling
1.17 Interrupt hardware concept
Interrupt 是一種改變程式正常執行流程的機制,可以由 Device 或者 CPU 本身產生
- Legacy Interrupt
- 由實體線路構成,每個裝置連接到實體的中斷線,中斷線連接到 Programmable interrupt controller(PIC, 可程式化中斷控制器),PCI 再向 CPU 的 INT 腳位發出中斷訊號
- PC 中斷線也就共 15 條,但是 Device 通常不只 15 個,因此必須數個裝置共用一條中斷線
- Message Signaled Interrupts
- 所有 Devices 共用一組中斷線路,裝置在中斷線路上寫入自己的中斷編號,就會觸發 CPU 中斷
- 這樣就類似在一條線上傳輸編碼,經過解碼器後推向 CPU,讓 CPU 對自己送出中斷,例如: PCI 的 MSI-X 支援 2048 個中斷編號
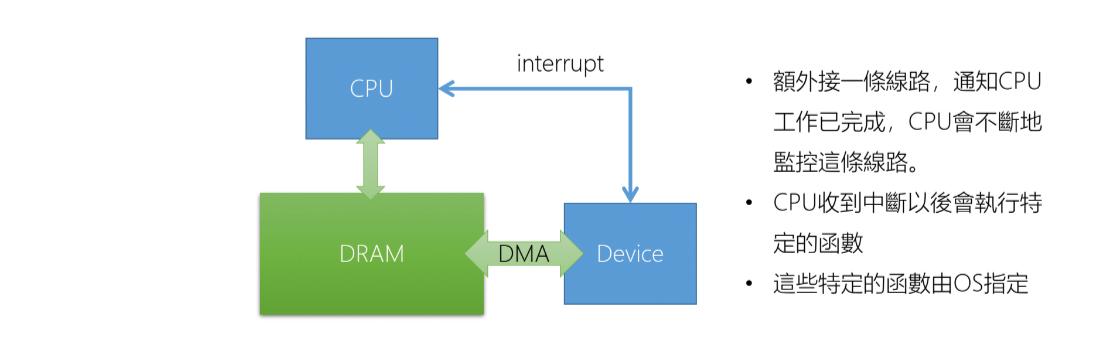
CPU 會設計好 IVT 的位置,由 OS 放入適當的 ISR 這部分也是驅動程式(Device Drver) 的一部分
1.20 Interrupt vector table
- Interrupt 處理流程:
- Interrupt Request: 當中斷請求發生時,將所有中斷 Disable,將 CPU 切換到 Kernel mode
- Store State: 暫停目前的 Process 並保存此 Process 的執行狀況
- Interrupt Vector Table: OS 根據 Interrupt ID 查詢 IVT,並取得 Interrupt Service Routine 的開始位置
- Interrupt Service Routine: 執行 ISR
- Restore State: 恢復之前 Process 的執行狀況
- 這時候不一定恢復原本的 Process,因為 System call 可能改變 Process 的狀態,由 Scheduler 來決定下一個執行的 Process(不一定是原本的 Process)
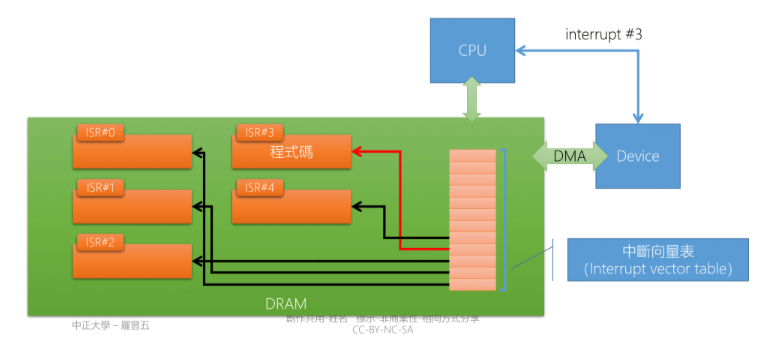
- IVT 放置的是 ISR 的開始位置
- ISR 開頭都是用組語寫的,如果 C 的執行環境設定好也可以用 C
1.21 Interrupt Service Routine
發生 Interrupt 時是 Disable Interrupt,但在 ISR 的時候可以視情況決定是否要 Enable Interrupt,要允許哪寫 Interrupt,如果再 ISR 中 Enable interrupt 表示允許巢狀中斷(Nested Interrupt)
- Nested Interrupt: 「一個中斷,被另一個中斷給中斷」
Linux 中,ISR 只處理必須立即處理的部分,剩餘的部分交由 Kernel thread 處理。例如: ksoftirqd
- ISR 中不能呼叫任何會造成「wait」的函數,例如: semaphore 中的
wait()- 從設計上
wait()的主體是 task (can context swtich),ISR 只是一個有自己堆疊的函數,不是 task - 從邏輯上 ISR 是處理 I/O 中的「必要部分」(緊急性),因此不應該
wait() - 如果程式邏輯上必須要
wait(),就要考慮是否把這部分留給 Bottom half 解決
- 從設計上
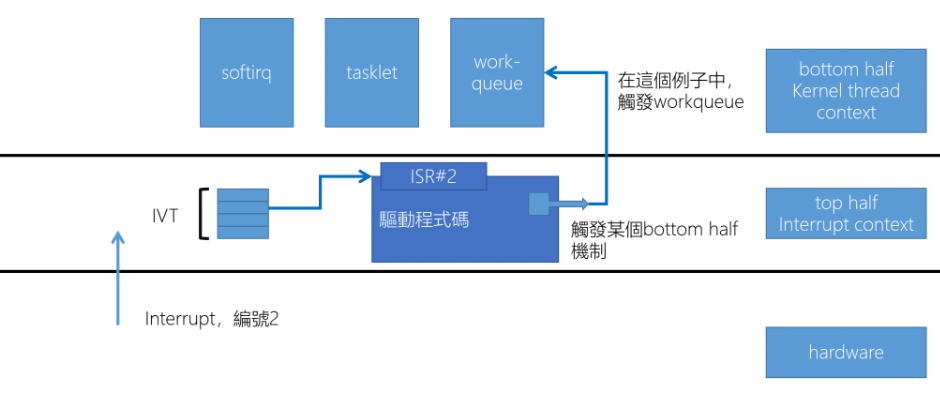
1.22 Bottom half
Bottom half 可以分為三種 softirq, tasklet, work-queue
- Softirq 可以在多個 CPU 上平行運行,必須在編譯時靜態註冊
- Tasklet 是建立在 softirq 之上的一種機制,tasklet 可以動態註冊和銷毀,相同類型的 tasklet 不能在多個 CPU 上同時運行
- Work-queue 是一種完全不同的機制,work-queue 可以確保同一種類型的 driver 只會在同一個 CPU 上運行 從效能高低上是從左往右排序,從易寫程度上是從右往左排序
- 理論上這三個都應該由 Kernel thread 來呼叫
- 如果是 Kernel thread(task) 那就可以 wait()
- 實際上 softirq, tasklet 在 Linux kernel 可以由 Linux kernel 提供的一小段程式碼在 ISR 結束時呼叫
- 這樣的話他是執行在 ISR 中,這樣是不能 wait()
會設計成 ISR 也可以呼叫的原因是,如果這次 ISR Loading 並不重的時候就乾脆全部的工作都在 ISR 完成,這樣的消耗會比呼叫 Kernel thread 更少
在 Driver Architecture 篇章會更詳細的說明
ksoftirqd 最多寫 32 個驅動程式在裡面,只有高速裝置會掛在 ksoftirqd 例如: Network Card
延伸閱讀: Difference between SoftIRQs and Tasklets, tasklet, taskqueue, work-queue – which to use?
1.23 Bottom half and Top half
Bottom half 的 softirq 每個 Core 就只有一個
ps -e | grep softirq
在這裡 Top half, Bottom half 分別指的是:
- Top half: 是指來立刻響應的 Interrupt 時處理的中斷函數,在這個階段執行快速且必要的硬體操作,如: 保存狀態,和呼叫 Bottom half
- Bottom half: 跟 Top half 的區別是執行期間 Interrupt 是啟用的
這裡進入 Bottom half 的工作會被包裝成一個 Struct 兩個 Pointer,包含 Function, Data,然後將這個 Struct 加入一個 Linked list, 之後等待 CPU 有空閒時 softirq 會從中取出 Struct 來執行 Bottom half。
- Function pointer: 該函數定義了 Bottom half 實際的執行工作,包含: 處理資料,啟動另一個 I/O 等等
- Data pointer: 指向工作相關的資料,硬體的資料,要計算的參數,需要修改的 Memory 等等
在 Linux 中,當 top half 決定將一些工作推遲到 bottom half 時,這些工作會被包裝成一個結構,該結構包含兩個指標:一個函數指標和一個資料指標¹。
1.24 Polling
如果系統的 Loading 很輕,並且系統請求的時間比較沒規則時 Interrupt 會比較好,但如果負載高 Interrupt 被不斷的送出, 這樣可能會導致 CPU 不斷的去處理 Interrupt,此時 Polling 會比較好
- 與 Interrupt 不同,Polling 是 OS 每隔一段時間主動去探詢裝置的狀態
- 如果數個 Device 共用同一條 Interrupt 那麼當 Interrupt 發生時,OS 必須
- 某些裝置同時支援 Interrupt 和 Polling,例如: Network Card,可以在負載量高/低時做切換
像滑鼠跟鍵盤就通常是採用 Polling,除非有特殊需求,例如: 電競滑鼠
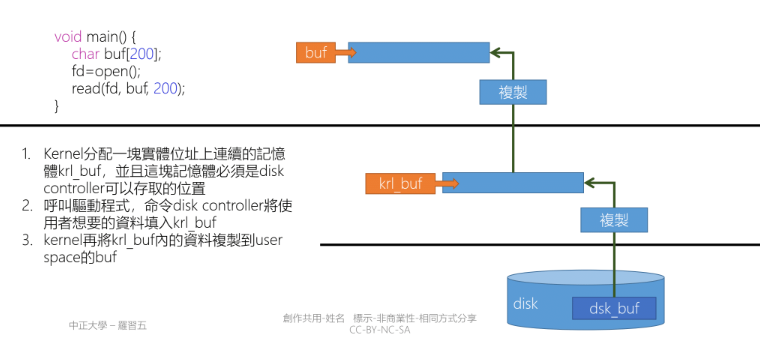
1.25 Buffering and Kernel bypass
- read(fd, buf, 200) 會用掉四個 Register
- read(): 本身就是參數(No. 3 Interrupt, $AX 要設定為 3)
- fd: 從哪裡讀資料
- buf: buffer 的起始位置,200 Buffer size
- read 呼叫後 Kernel 會配置 krl_buf,DMA 傳輸會將資料從 dsk_buf 搬移到 krl_buk
- 最後由 Kernel 將資料 Copy 到 Userspace
- Kernel bypass: 是指不需要透過 Linux kernel 的功能,使用自己實現的相同功能的程式碼直接將 Device 的資料 Copy 到 Userspace
- 這可以幫助解決在高 concurrent 下由於 Interrupt Handling, Memory Copy, Context switch, Locality miss, CPU Affinity, Memory Management 所造成的性能瓶頸
- 代表的技術有 DPDK, eBPF 等等
延伸閱讀: kernel-bypass 内核旁路技术介绍
Scheduler and File System
1.26 Process and Thread of Linux
- 在 Linux 提供下列 System call
- fork(), vfork() 產生 Process
- clone() 產生 Task(Process, Thread)
- execve() 將一個執行檔內的程式載入該 Task 中
- 對 Linux 來講 Process, Thread 都是 Task
- Linux 使用 Task struct 來描訴 Process, Thread
- Process, Thread 的差異只是「共享資源的多寡」,尤其是記憶體是否共用
- fork, vfork, clone 都是呼叫 Kernel 中的 do_fork
- 有一些 Thread 只執行於 Kernel mode,Linux 稱為 Kernel thread
1.27 Scheduler
如果只說 Scheduler 通常指的是 CPU Scheduler
- 傳統上 Scheduler 希望達成以下目標
- 依照優先權賦予優先權的公平性
- 所有的 Task 都可以在合理的時間內,再次獲得 CPU 使用權
- 優化 I/O 效能,例如: 處理 I/O 的設備可以先執行,接下來工作交給 I/O 設備
- Linux 更進一步的達到以下目標
- Multi-core 上能做到 Load balance
- Scheduler 本身不至於造成 Multi-core 的效能瓶頸
- 對多媒體、遊戲有更好的支援,CFS
- Linux 還未達到的目標
- Real-time system 的支援
- Linux 在手機上的 Scheduler 比 iOS 的 Scheduler 更耗電(iOS 並不是真正的多工 OS)
1.28 File system
在檔案系統要注意到這些: 新技術如: SSD、管理的問題(大檔案、零碎檔案)、存取行為(循序/隨機存取)、檔案的重複性問題、混合硬碟(SSD\HDD)
- Linux 使用 Virtual file system(VFS), 兼容多種檔案系統,大部分這些檔案系統都使用「i-node」的概念描述檔案
- i-node: 用於描述檔案或目錄,裡面儲存資料的屬性和位置,例如: 所有者、許可權、大小、最後修改時間等
- VFS: 透過統一的介面,使無論底層的檔案系統是什麼,都能透過介面處理,例如: open(), read(), write()
- File system: 用於管理底層裝置資料存取的機制,例如: ext4, NTFS, FAT32 …
- Linux 官方的 File system 是 ext4’
- ext4: 是 Journaling file system,因此當發生意外,檔案系統不至於完全損毀,並且能快速恢復(fsck.ext4)
- Linux 支援 btrfs,btrfs 借用了 zfs 的很多概念,主要包括:
- snapshot, copy-no-write, hot plugging HDD/SSD, difference disk load balance, backup support
Hardware progress
1.29 SMP and CMP
1.30 Single-ISA heterogeneous multi-core
1.31 UMA and NUMA
- 目前已經很難提升 CPU 的 Clock
- 相同架構下,提升 Clock 是最直接方式來的提升 Performance
- 提高 Clock 會遇到大量的熱,也是提升效能的瓶頸
- Processor, Menory, Storage 等等藉由不斷的「複製,貼上」產生平行運作
- 平行運作往往需要軟硬體結合
- 很多時候,硬體提供「多種選擇」給軟體進行優化
寫平行化程式,程式碼每年可以有 23% 的效能提升,否則只有 4.6%
平行處理架構指的是「同時使用多個 Process(Core)」例如: PC 常見的 Multi-Core Process 他的優點:
- 提高產能: 在工作可以平行化時,產能將以倍數提升
- 成本考量: 相較於高時脈的 Processor,工作平行化後,數個時脈低的 Processor 能得到一樣的效果
- 增加可靠度: 高階伺服器可以提供 Processor, Memory 熱插拔的功能,例如: Linux, 可以在不停機的情況下更換 CPU
1.29 SMP and CMP
- Symmetirc multiprocessor(SMP, 對稱多處理)
- 每個 Processor 的地位是等價的,應用程式可以在這些處理器上做轉移(migration)
- 在這個架構上所有 Processor 都共享一個共同的 Main memory,有可能會導致記憶體存取衝突而影響效能
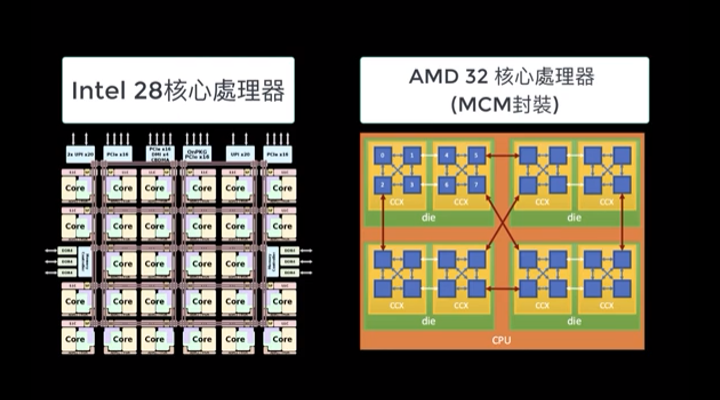
- Chip multiprocessor(CMP, 單晶片多處理) 也稱作 Multi-core
- 將多顆 (Core)Processor 集成至一顆晶片
- 每個 Core 都有自己的 Cache 可以減少對共用 Memory 的存取需求
- 共享最下層的 Last level cache(LLC),因此不同 Core 之間的轉移比較快速
- Simultaneous multithreading(SMT, 同步多執行緒)
- 在一顆 Processor 上用硬體模擬出 N 顆 Process,硬體的主要成本是 Logical register 數量增加 N 倍
- 能更有效的利用 Processor 內部的 Function unit,如: 加法器,乘法器等
Intel 宣稱他們實現的 SMT(Hyper-threading) 增加 5% 的晶片面積,可以獲得 15% ~ 30% 的效能提升
AMD 於 2017 推出的 Zen CPU 也實現了 SMT
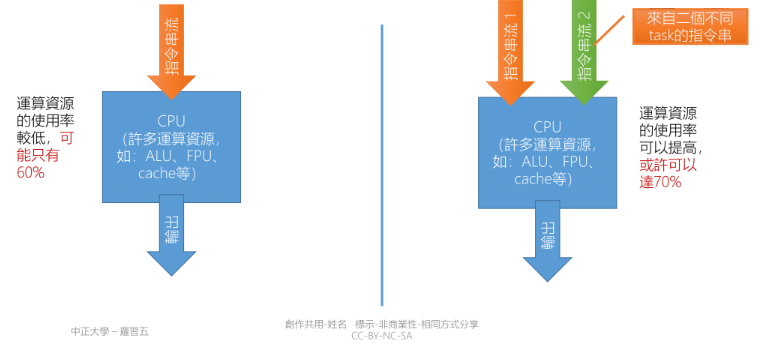
上方右圖有兩個 Instruction flow(Register set) 去競爭資源,例如: Floating point unit, Adder, Loader, Storer
SMT 不是去增加系統的速度,是增加系統的使用率,前提是有足夠的 Task 跟進行的運算可以 Loop unrolling,
例如: Fibonacci 因為每次都必須算出前一個數字才能繼續後面數字的運算
延伸閱讀: Algorithm Efficiency - Is partially unrolling a loop effective if it requires more comparisons?
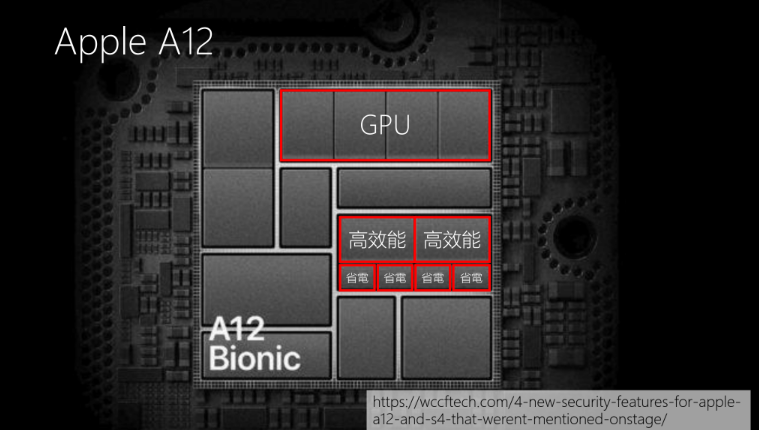
1.30 Single-ISA heterogeneous multi-core
- 在學術上是多個處理器,這些處理器使用同樣的指令集,但是處理器的內部設計(Micro-Architecture)不同
- 例如: Clock,Pipeline depth,Funciont unit number
- 有些程式指令平行度高,適合 Pipeline、Superscalar
- 有些程式指令平行度低,適合 In-order issue、High clock processor
- 因 Instruction set 相同,OS 可以幫合適的 Task 挑選適合的 Processor
- ARM 上實現的 Big-Little 架構是上述的一個實現
- 雖然 Processor 運算速度不同,但其 Instruction set 相容
- OS 可以依照需求使用高效能 Processor(Big) 或省電型 Processor(Little)
在 Big.Little 中可以做 Task migration,這部分是 OS 跟 Programmer 需要去考慮的
- SMT 是由 DM Tullsen, SJ Eggers, HM Levy 所提出
- Simultaneous multithreading: Maximizing on-chip parallelism, ISCA, 1995.
- Intel 於 2002 實現這個構想,並將它稱之為 hyperthreading
- Big.LITTLE 的概念由 R Kumar, KI Farkas, NP Jouppi, P Ranganathan, DM Tullsen 提出
- Single-ISA heterogeneous multi-core architectures: The potential for processor power reduction, MICRO, 2003.
- 更厲害的是:這二個架構的創想來自於同一個實驗室
- https://cseweb.ucsd.edu/~tullsen/
1.32 UMA and NUMA
- 目前為止(2018)所使用的 Processor memory architecture 大部分為 Uniform memory access(UMA)
- 大致上可以說: 每個 Processor 存取任何位置的 Memory 的速度都是相等的
- UMA 架構使用一套記憶體插槽,也就是共享 Memory bus
- 對於 UMA Processor 而言,當 Processor 增加時,記憶體頻寬是效能瓶頸所在(Intel core i9 是有 18C36T 的 UMA Processor)
- Non-Uniform memory access(NUMA)
- 傳統上是插兩個以上的 CPU,如部分機架式伺服器: HP DL380 Gen7
- AMD 的 threadripper 將兩顆 CPU 封裝在一起,threadripper 上可以看到兩個 DRAM 插槽
- 對 NUMA 來說記憶體分為 Local, Remote,存取 Local 時的速度會較快

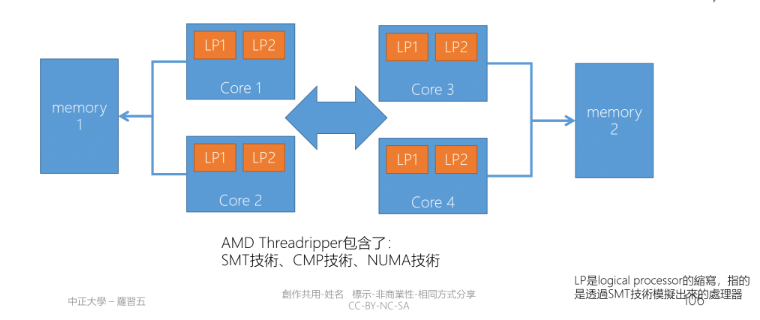
這樣的做法兩邊都會有獨立控制的 Memory bus,避免了部分的記憶體頻寬的效能瓶頸
Driver Architecture
Driver 中可延遲處理(Bottom half) 的形式就分成三種,這部分在 Bottom half 簡單提過:
- softirq(軟中斷)
- softirq 支援 SMP,同一個 softirq 可以在不同的 CPU 上同時運行,softirq 必須是 Reentrancy(可重入的)
- softirq 是在編譯期間靜態註冊,不像 tasklet 那樣能被動態註冊或去除
- HI_SOFTIRQ, TIMER_SOFTIRQ, NET_TX_SOFTIRQ, NET_RX_SOFTIRQ, SCSI_SOFTIRQ, TASKLET_SOFTIRQ
- 基本原則是使用在高速裝置或該裝置不能被延遲,如: Network RX/TX, Timer inputerret, Disk, tasklet
softirq 在 Kernel 編譯是就已經定義、註冊好,通常是不會去做改寫。會使用 softirq 的原因主要是因為發現 I/O 的效能瓶頸是在 CPU, 前提是要有足夠的 Processor。
- tasklet
- tasklet 不允許兩個相同類型的 tasklet 同時執行,即使在兩個
- work-queue
- 由 Kernel theard 來實現,所以可以被 context switch(前兩種只能被 ISR 打斷)
- 適合需要長時間執行,或需要 seelp
- 默認可以被 Interrupt,不持有任何 Locked
延伸閱讀: V-Softirq in Linux Device Driver – Linux Device Driver Tutorial, Linux softirq, tasklet, workqueue
下面是 Interrupt 離開時觸發 softirq 的流程與程式碼:
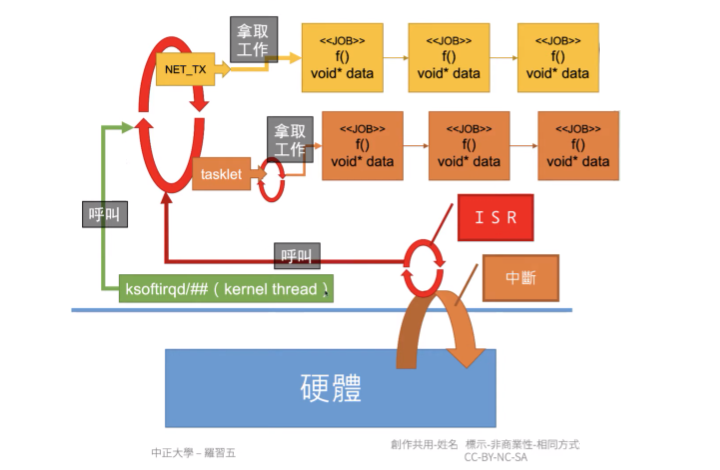
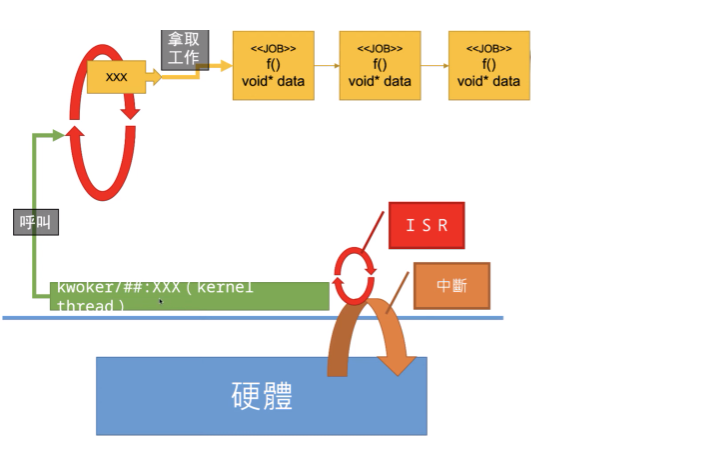
ksoftirq 是在 Kernel thread 會去呼叫 Loop,這個 Loop 會不斷去拿工作來做,這個 Loop 可以被 ISR 或 ksoftirqd 呼叫, 如果是由 ksoftirqd 呼叫那就可以 sleep,但如果是由 ISR 呼叫 Loop 則是執行在 Interrupt context 那就不能 sleep。
- 會設計 ISR 可以呼叫 Loop 的原因是 Linux 為了優化,如果 Interrupt 所觸發的工作並不多,就乾脆在 ISR 中處理完
- 若是由 ksoftirq 呼叫就會讓 Interrupt 先結束,後續讓 Scheduler 來安排 Task 進行工作
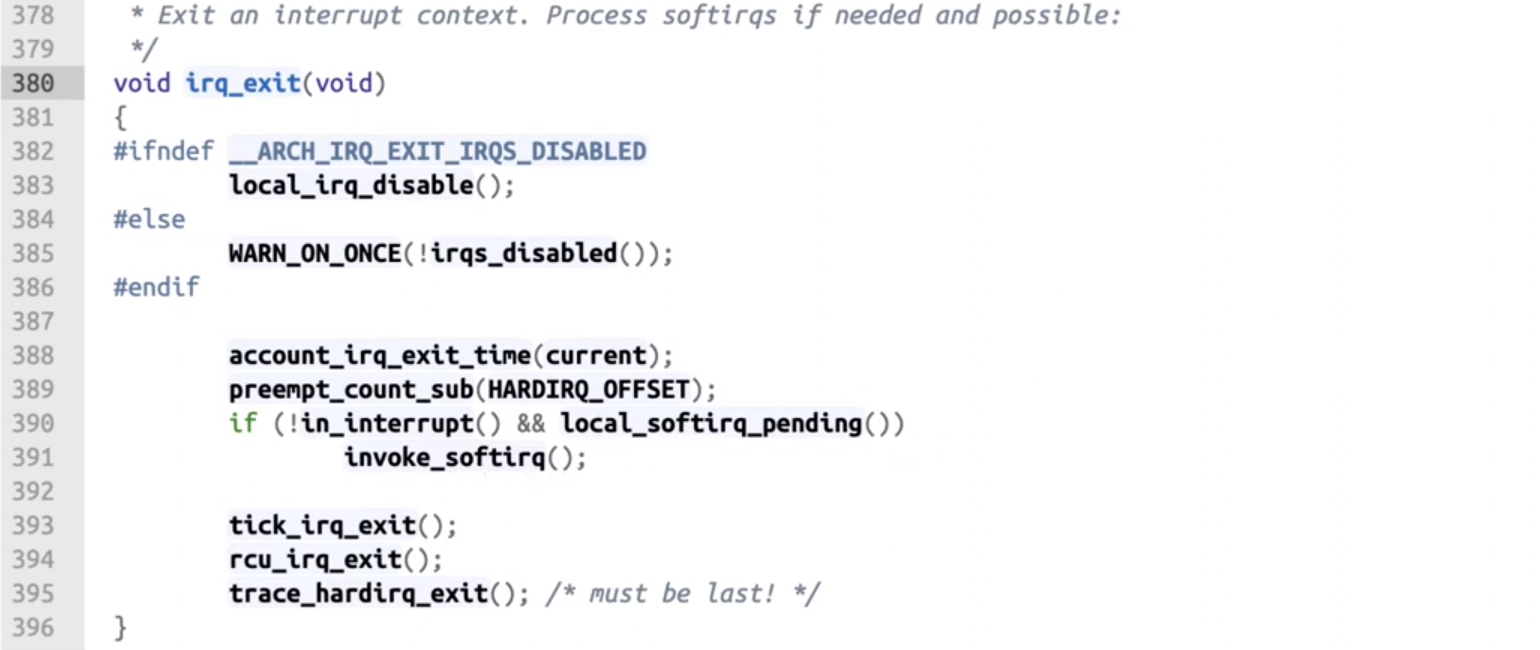
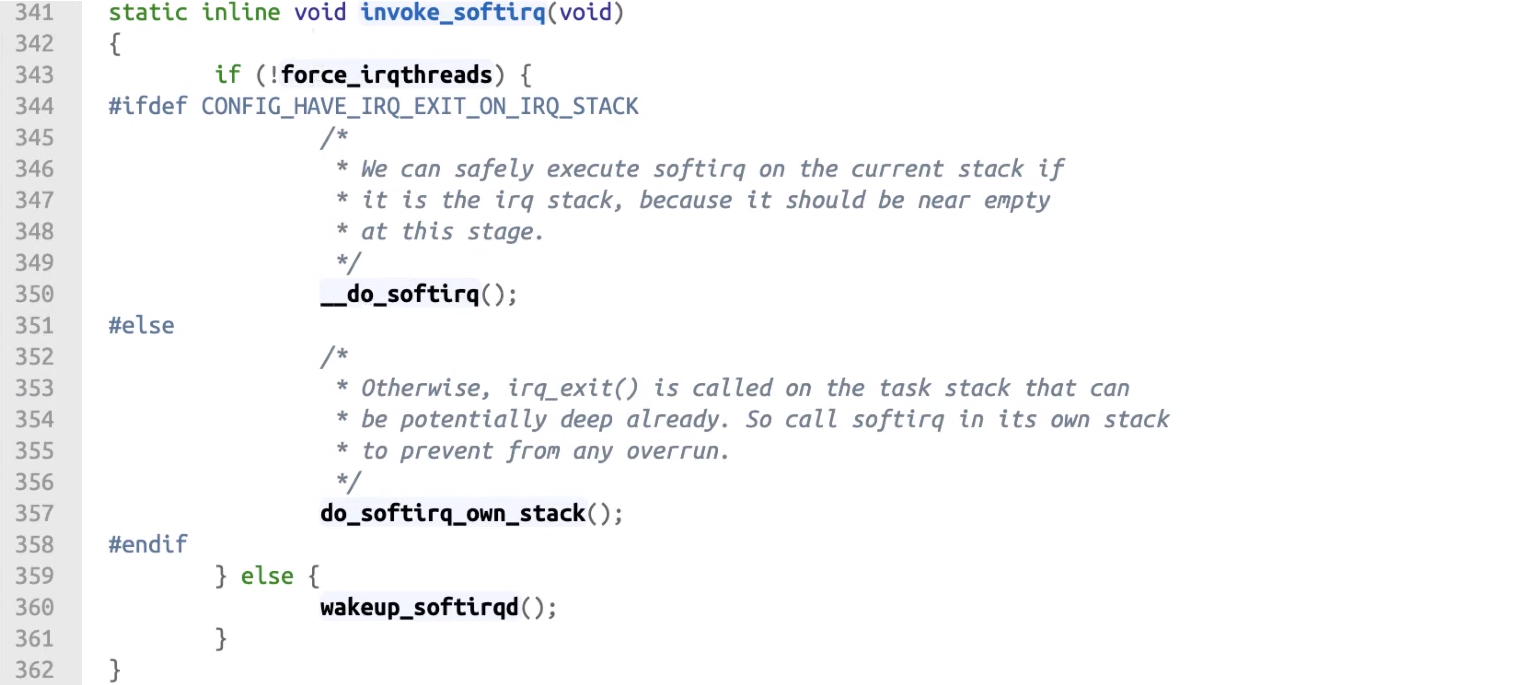
invoke_softirq()會去 Loop 中拿取工作來執行force_irqthreads用這個變數來判別是 Interrupt context 呼叫還是 Kernel thread__do_softirq(),do_softirq_own_stack()都是去執行 softirq,差異在 IRQ STACK 詳細可見延伸閱讀wakeup_softirqd()則是叫醒 ksoftirqd 把剩下的工作交給 ksoftirqd 來排程
相較於 softirq, work-queue 的流程單純很多,不會運行在 Interrupt context:
General rules for driver writing
共用的資料跟誰共用,雙方是否會同時執行:
- 會: 就要使用 spinlock(Mulit-Processor)、semaphore(Signle-Processor)
- 不會,那要注意是否會 Preempt:
- 誰會 Preemmpt 誰
- 如果單一方向如 A Preempt B,B 去 Disable A 就不會有 Rest condition,例如: Scheduler, Local IRQ, Bottom half
- 如果是雙向的 Preempt 那就是會同時執行
- 要很清楚程式中隱藏的意思
- 例如: malloc 是否會造成 Context switch, write 會做 I/O 動作會不會 Context switch
Start the OS
1.33 Start the OS
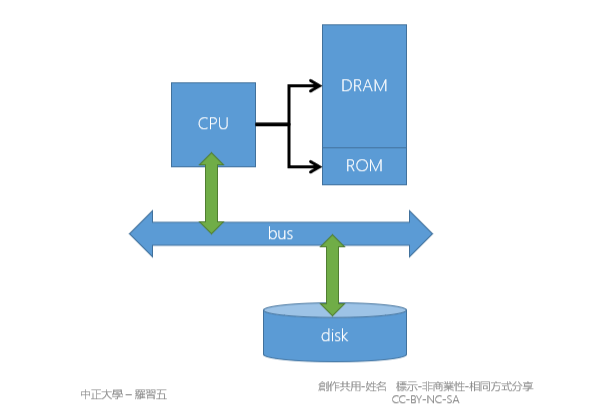
為什麼不能直接從 Disk 啟動 OS,這是因為 Disk 也需要 Driver 來啟動
- CPU 能直接控制 DARM, ROM 是因為這兩者都是 Byte address
- CPU 只要在 Address bus 上放入要讀取的資料的 Address 就能從 Data bus 上讀取想要的資料
- Disk 屬於 Block device 需要下達命令告訴 Disk 需要第幾個 Block,之後 Disk 再講 Block 寫到軟體指定的位置,如: (ATA-8, ATAPI)
如果沒有軟體驅動的情況下 CPU 無法直接讀取 Disk,因此需要在 PC 架構中在 Boot rom 中放入「BIOS」, BIOS 的重要目的就是讀取 Disk 上的 Boot sector。
Bootstrap
- BIOS(ROM) 讀取 Boot sector(通常是 Disk 上的第 0 個 Block)
- BIOS 會帶起來的是 GRUB(Boot loader),現在也可以從 BIOS 使用 UEFI(BIOS 也認得 OS)
- 如果帶起的 OS 是 Linux 那麼就必須把開機相關的檔案放在 /boot 下,並且 GRUB 認得該目錄使用的檔案系統
- Linux kernel 先掃描裝置狀態,根據裝置狀態配置記憶體(Virtual memory layout),之後再啟動 Cache
- 先設定 Virtual memory 是因為這裡必須將映射到 I/O 的部分設定為 Non-cached
- Linux kernel 啟動後,啟動第一個 User space 的程式,傳統上是 init,也有許多 Linux 改用 systemd,他們的 pid 都是 1, 負責 Linux 後續的初始化
這裡是因為對應 I/O 的區段(例如: DMA),不希望這些操作被 Cache,如果被 Cache 可能會導致資料不一致,因此要先設定 Non-cached
BIOS limitations
- BIOS 必須要認得 Disk 上的開機 Block,如果 BIOS 不支援該 Disk,將無法啟動 OS(例如: 容量超過 BIOS 的定址範圍)
- BIOS 內含多種驅動程式,例如要支援 USB
- 大部分 BIOS 不支援藍芽裝置,因此開機時的藍芽滑鼠,鍵盤等等都不能與 BIOS 互動
Last Edit
10-09-2023 18:27